制御・ロボティクス研究室
研究の紹介
制御やロボットなどの技術は様々な場面で用いられ,私たちの生活をより良いものにしてくれます.本研究室では,制御工学,バイオメカニクス,ロボティクスなどの分野に取り組み,安心・安全な生活,健康維持によるQOLの改善,ロボットの野外活動の促進に貢献する研究を行っています.

制御工学-研究例その1

遠隔地地震波系データを用いた予見形振動制御系の設計
地震外乱を受ける構造系の振動制御系のさらなる性能向上のため,リアルタイム地震観測網(防災科学技術研究所 強震モニタ等)から得られる遠隔地波形配信データを用いて,制御される�構造系に地震外乱が到達する前に地震の未来波形を予測し,先回りして制御する手法を研究しています.未来波形は震央付近のデータを用いて地震波形をAI等により予測を行っています.将来の大地震に対する構造物の安全性を高め,被害軽減の実現を目指しています.
制御工学-研究例その2
液体搬送スロッシング抑制制御
飲料水や石油などの液体を搬送する際,容器に振動が与えられると内部の液体が大きく揺れるスロッシングという現象が発生します.液体を搬送する車両においてスロッシングが発生すると,車両の操作性が悪化し事故が起こりやすくなってしまうため,この現象を抑制する必要があります.私達の研究では,液体タンクを水平移動させる制振機構を設けることでスロッシング制御系の設計を行っています.

バイオメカニクス-研究例その1

超音波エラストグラフィ測による
剛性評価
超音波エラストグラフィとは,体内に超音波を当てることで体を傷つけずに体内組織の剛性や硬さ変化を測定する手法です.じん帯や筋など軟組織の剛性を測定することで加齢やけがなどによる組織の特性変化を調査・評価する研究を行っています.超音波エラストグラフィを用いて詳細に体内組織を測定することで,人々の健康の維持や改善に繋げることができます.
バイオメカニクス-研究例その2
歯科口腔,顎顔面における
バイオメカニクス
CT画像を元にした歯のモデルと口腔内に構築された新たな三次元ワールド座標系を用い,歯の基準情報となる歯軸,重心,歯列等を評価する研究を行っています.私達の取り組む研究により歯の生え方や並び方を明らかにすることで,歯科医療技術の向上を目指しています.


ロボティクス-研究例その1
月・火星移動探査ロボットの開発
月や火星の地表は砂漠のような柔らかい砂で覆われています.このような地盤ではロボットは砂の上を滑って動けなくなってしまいます.本研究では地盤に振動を与えて固くすることで滑るのを抑えながら歩く脚型ロボットを開発しました.地盤と振動の関係性はとても不思議で,地盤は振動を与えている時は柔らかくなり,振動を与えてから止めると固くなります.この特徴を利用して様々な移動ロボットを開発しています.
ロボティクス-研究例その2
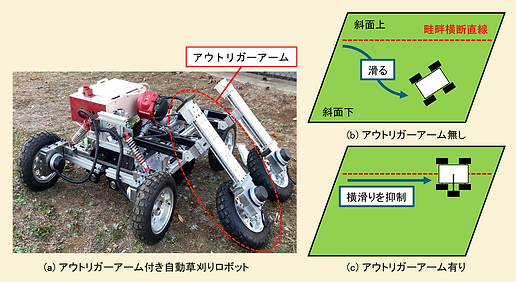
自動草刈りロボットの開発
水田に見られる畦畔などの斜面の除草は転倒などのリスクがあり危険な作業です.この課題を解決するために私達は草刈りロボットの開発を行っています.畦畔での草刈りでは斜面横断走行時に横滑りが発生するという課題があります.私たちの開発するロボットではアウトリガーアームを装着するアイデアを提案しました.アウトリガーアームで車体を支持することで横滑りを抑制させることができます.現在は草刈り作業の自動化にも取り組んでいます.